

[vc_row][vc_column]
Ce système a été mis en place par le département de défense des Etats-Unis en 1973 pour l’armée.
Les signaux de positionnement sont transmis par 24 satellites en orbite depuis 1995 et peuvent-être reçus et exploité par n’importe qui depuis 2000. Que vous soyez sur terre, en mer ou dans les airs vous pouvez connaître votre position et votre vitesse à n’importe quel moment.
Même si le langage courant retient souvent le terme GPS, il est plus juste d’utiliser le terme GNSS car d’autres constellations et systèmes de positionnement ont rejoint le GPS américain.
Ce système basé sur des satellites est composé de 3 segments :[/vc_column_text][vc_empty_space]
- Le segment spatial (satellites),
- Le segment de contrôle (les stations au sol),
- Le segment utilisateur (Récepteur mobile).
- Soit la mesure du temps via des signaux émis par au moins 4 satellites pour parcourir la distance les séparant de l’utilisateur,
- Soit le décalage de phase des signaux, et dans ce cas un appareil sophistiqué doit lever des ambiguïtés (nombre d’oscillations entre l’émission du signal satellite et de la réception du mobile de l’utilisateur).
La mesure du temps doit donner une précision décimétrique et le décalage des phases doit donner une précision millimétrique.
Pour améliorer la qualité du géopositionnement, le GPS utilise le système SBAS (Satellite Base Augmentation System) qui permet de transmettre des corrections et le système GBAS (Ground Based Augmentation System) qui transmet aussi des corrections de positionnement.
[/vc_column_text][vc_empty_space][vc_column_text]Le Global Navigation Satellite System (GNSS), qui est le nom des systèmes satellitaires qui fournissent une couverture globale de géopositionnement, est d’ailleurs très suivis par les russes (GLONASS : GLObal nAvigation Satellite System).
Cette technologie de géopositionnement est d’ailleurs aussi utilisée dans des dispositifs expérimentaux tels que :
- Géolocalisation d’habitats, d’espèces patrimoniales, d’essences de fruitiers (précision métrique),
- Définition du contour d’un dispositif expérimental (précision centimétrique),
- Géonavigation appliquée à l’agriculture de précision (précision centimétrique avec un objet en mouvement).
[/vc_column_text][vc_empty_space]
C’est l’Air Force qui gère la constellation afin d’assurer la disponibilité de 24 satellites minimum 95% du temps.
Le tout premier satellite a été lancé en 1975 mais le système ne fonctionne réellement que depuis 1995. A l’heure où j’écris ces lignes, nous comptons 32 satellites dans la constellation NAVSTAR avec quelques satellites déclassés qui peuvent-être réactivés si besoin.
Les satellites naviguent dans l’Orbite terrestre moyenne (MOE) à une altitude d’environ 20 200km. Ces satellites effectuent, chaque jour, 2 fois le tour de la terre. La configuration des trajectoires est de telle sorte que les GPS peuvent capter les signaux d’au moins 4 satellites n’importe où à la surface du globe et ce, à n’importe quel moment.
Les 32 satellites sont équipés d’une horloge atomique et émettent en permanence sur 2 fréquences : L1 (1575,42 MHz) et L2 (1227,60 MHz) qui sont modulées par des codes et par un message de navigation (permettant le calcul de positionnement des satellites).[/vc_column_text][vc_empty_space]
Le segment contrôle comprend une station de contrôle principale, une station alternative, 12 antennes de contrôle/commande et 16 sites de suivi.[/vc_column_text][vc_empty_space]
Ce récepteur calcule la géolocalisation de son antenne. Le matériel de réception sera plus ou moins sophistiqué selon la précision désirée et selon les contraintes du projet (mobilité de l’utilisateur, fermeture du milieu…).[/vc_column_text][vc_empty_space]
Ce principe permet de localiser un objet en connaissant la distance qui le sépare de 3 points de référence.[/vc_column_text][vc_empty_space][vc_column_text]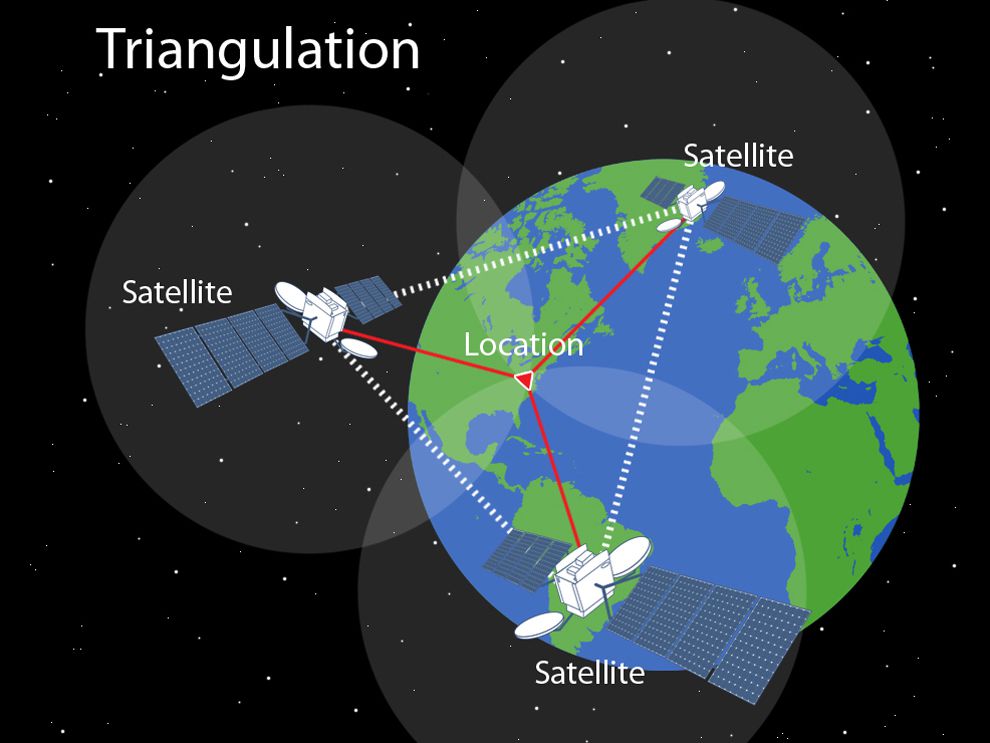
Source : National Geographic Society
[/vc_column_text][vc_empty_space][vc_column_text]En 3D, il est nécessaire de rajouter une quatrième distance qui relie l’objet à un autre point de référence pour connaître l’altitude (multilatération).
Le principe de calcul des distances séparant le récepteur d’au moins 4 satellites repose sur le temps que mettent les signaux du code C/A pour parcourir la distance séparant l’utilisateur des satellites.
Le temps est multiplié par la vitesse de propagation du signal (vitesse de la lumière) afin d’obtenir la distance satellite et utilisateur. La précision de la méthode atteint 1 mètre si on lui associe les corrections de positionnement.[/vc_column_text][vc_empty_space][vc_single_image image= »2078″ img_size= »full » alignment= »center »][vc_empty_space]
Les ondes ont des vitesses variables selon le milieu traversé. Emises par les satellites, les ondes ont à traverser des couches de l’atmosphère plus ou moins humide, plus ou moins ionisées. L’humidité et les modifications de pression de la troposphère modifient la vitesse et la direction de propagation des ondes radios.
Une autre couche traversée par les signaux : l’ionosphère. C’est une couche ionisée par le rayonnement solaire. Elle modifie la vitesse de propagation du signal.
[/vc_column_text][vc_empty_space][vc_single_image image= »2086″ img_size= »full » alignment= »center »][vc_empty_space][vc_column_text]Le GPS a été conçu par et pour les militaires américains. Un certain nombre de moyens ont été mis en place pour empêcher l’utilisation du système par un ennemi.
Ce but est atteint par 2 brouillages, la dégradation volontaire de la précision du positionnement et le cryptage du code P. La « Select Availability » (SA) est une dégradation de la précision des horloges embarquées à bord des satellites. Le cryptage P rend impossible la mesure directe des pseudos-distances.[/vc_column_text][vc_empty_space]
- SBAS (WAAS/EGNOS)
Le principe de ce système est que les satellites géostationnaires délivrent en temps réel des corrections qui permettent d’accroître la précision ainsi que des informations permettant de garantir l’intégrité de ces corrections.
Le système EGNOS prend en compte les satellites des constellations GPS et GLONASS (qui devient prochainement Galileo). Le système équivalent dont la couverture est principalement américaine s’appelle le WAAS (Wide Area Augmentation System).
- LBAS (DGPS/RTK)
Ce système est un processus de différenciation qui supprime les sources d’erreurs de positionnement du GPS et améliore son intégrité. Les corrections sont appliquées au GPS mobile en temps réel ou dans un logiciel post-traitement.
Si le GPS est en mouvement et que la précision souhaitée est centimétrique en temps réel, la géolocalisation utilisera la phase plutôt que le code et des algorithmes pour répondre aux contraintes de mobilité.
[/vc_column_text][vc_column_text]
Sources : Bernier S, Duthoit S, Ladet S, Baudet D (2014) Les concepts de base des systèmes d’information géographique (SIG) : les données et les fonctions générales. Le Cahier des Techniques de l’INRA, N° spécialGéoExpé. pp. 19-26. Duquenne F, Botton S, Peyret F, Bétaille D, Willis P (2005) Localisation et navigation par satellites. Edition Hermés lavoisier, 2e édition revue et augmentée, ISBN : 2-7462-1090-8, 330 p. Lahaye R, Ladet S (2014a) Les concepts de base des SIG nomades. Le Cahier des Techniques de l’INRA, N° spécial GéoExpé. pp. 28-35. Lahaye R, Ladet S (2014b) Les réseaux de correction différentielle. Le Cahier des Techniques de l’INRA, n° spécial GéoExpé. pp. 36-43.
[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]

[/vc_column_text][/vc_column][/vc_row]





